Path Planning Simulation in Controlled Environments using the Ant Colony Optimization Algorithm
Research and Programming Projects | | Links: Source | Paper | Video | Thesis
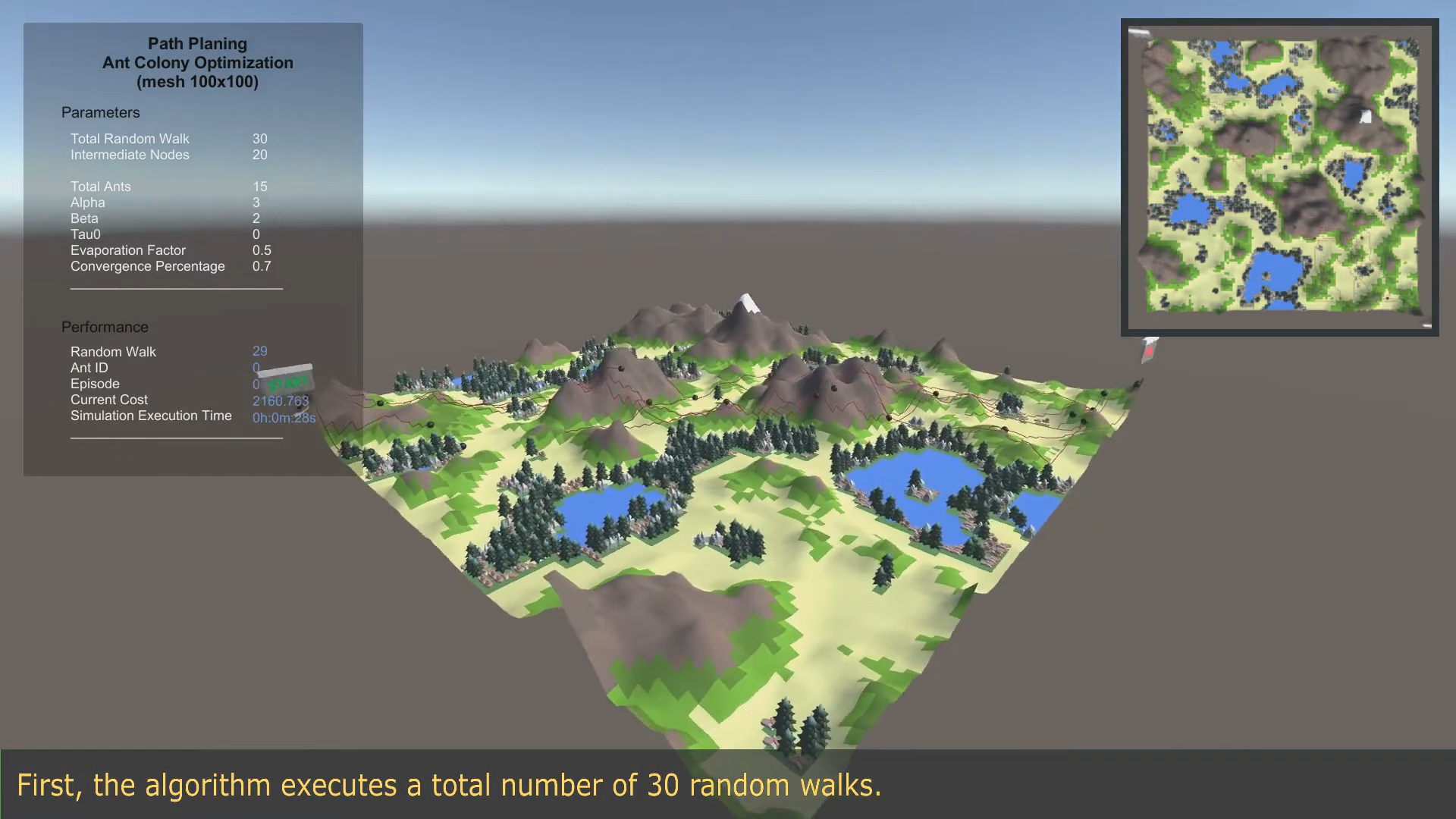
The project aims to lay promising methods to deal with a fundamental path planning problem; overall, the project seeks to deal with the stuck conditions in path planning problems. Stuck conditions are prevalent in this algorithm, averting the algorithm’s convergence, mainly when the environment presents many obstacles. This work was part of my undergraduate thesis project.
Path Planning, Ant Colony Optimization
PUBLISHED
